RPM Filters
Introduction
RPM filters clean up the gyro signals by filtering out vibrations that are coming from the rotating parts in a helicopter: the main rotor, tail rotor and motor(s). These vibrations are seen as noise in the gyro signal. Removing these vibrations (noise) results in a cleaner signal which is more representative of the physical movement of the helicopter. A cleaner signal is much better for the controller to operate from.
Nothing comes for free. Filters result in a cleaner signal at the expense of lag. The filtered signal is slightly slower than the original. This means to have the most responsive controller we should minimise the filters used.
Dynamic filters
Dynamic filters will filter the gyro signal when an RPM measurement is not available or it is not accurate. These are not as capable as the RPM filters. These can be used if
- No RPM signal available - Helicopters that do not have an RPM input or bi-directional dshot.
- Autorotations - In this case the RPM measurement is not correct due to the one way bearing. You may wish to enable 2 notches to account for this.
RPM Filters
Filter Tuning
Make a blackbox log of a short flight with constant headspeed. Scroll to the point where the heli has spooled up and is hovering. Mark that point with the I key. Scroll near the end and mark that with the O key. Now bring up the Analyzer Display and enlarge it. It might look like:
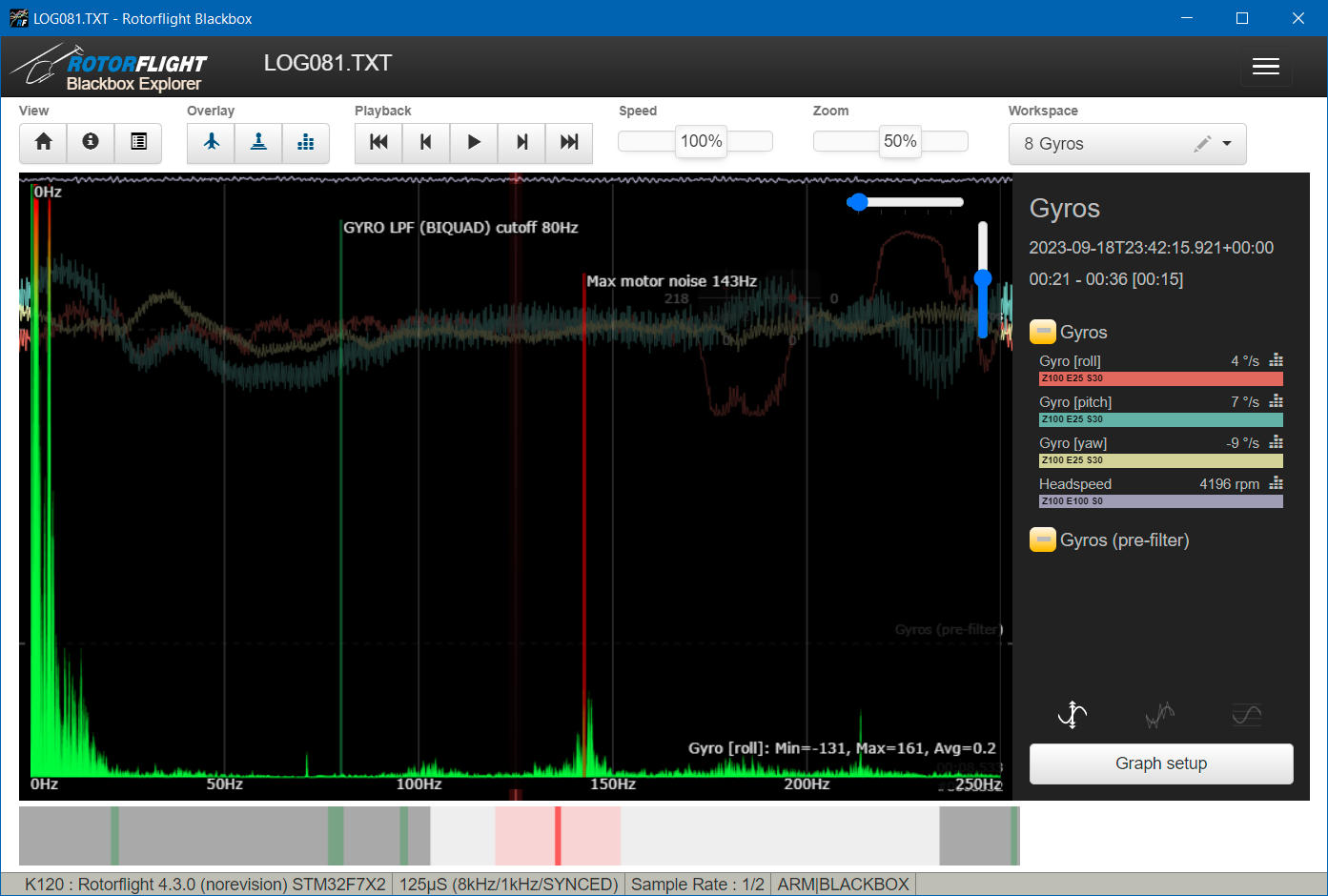
This log was made with only a double fundamental filter. As you can see there's some noise around 144Hz. Since the headspeed is 4200 RPM, that must be near the second harmonic (4200/60 = 70*2 = 140Hz). Also note that the gyro signal in the background is also a bit noisy.
Now let's add some single filters for the 2nd (140Hz) and 3rd (210Hz) harmonic. Suddenly the log looks a lot cleaner:
